第11章 齿轮系及其设计
第十一章 齿轮系及其设计
1.学习要求
1)了解轮系的分类和功用,正确分析轮系的类型。
2)掌握定轴轮系、周转轮系及复合轮系传动比的计算方法,会确定轮系从动轮的转向。3)了解行星轮系的效率计算,以及选型和齿轮齿数选取等行星轮系设计的基本知识。4)对新型行星齿轮传动有所了解。
2.重点难点
本章学习的重点是:轮系传动比的计算,特别是周转轮系和复合轮系传动比的计算。学习的难点是:复合轮系如何正确划分为各个基本轮系。
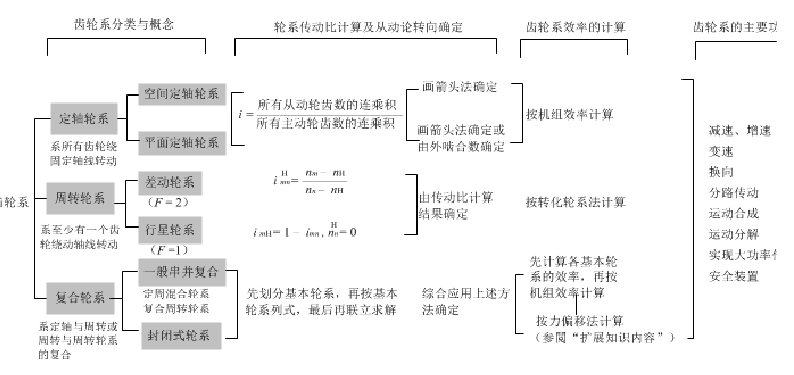
3.知识脉络
4.学习方法
(1)搞清轮系的组成及运动特点,正确地划分和判断轮系的类型
轮系的类型不同,其传动比计算方法也就不同,所以正确地划分和判断轮系的类型是正确计算轮系传动比的前提。轮系的分类主要是根据轮系在运转时其所有齿轮的轴线相对于机架是否在运动来划分的。所以在确定轮系为何种轮系时,首先应观察在组成该轮系的所有齿轮中是否存在其轴线相对于机架是运动的齿轮。若组成轮系所有齿轮在运动时都是绕固定轴线转动的,这个轮系就属于定轴轮系;若组成轮系所有齿轮中至少有一个齿轮是绕运动轴线转动的,则存在周转轮系,这个齿轮就为行星轮,而与行星轮相啮合且绕固定轴线转动的齿轮则为太阳轮,支撑行星轮轴线的构件则为行星架,这部分轮系便为周转轮系。
差速器

空间定轴轮系
(2)首先应掌握定轴轮系传动比的计算方法
轮系传动比的计算是基础知识,应熟练掌握。轮系传动比计算包含确定传动比的大小及从动轮的转向两项任务。
定轴轮系传动比的计算很简单,但属于其他各类轮系传动比计算的基础,如周转轮系传动比计算是利用其转化轮系即转化为定轴轮系来计算的,所以掌握轮系传动比计算方法。
首先,要掌握好定轴轮系的传动的大小计算和从动轮的转向判断方法。
定轴轮系中从动轮的转向判别的一般方法为画箭头的方法,适合于各种定轴轮系的情况。定轴轮系的从动转向判断和表示方法如下:
1)平面定轴轮系即组成轮系的所有齿轮的轴线或运动平面都是相互平行的,此类定轴轮系通常全由直齿或斜齿圆柱齿轮组成。其从动轮的转向确定方法:一法用画箭头法确定,即依据外啮合转向箭头指向相反,内啮合转向箭头指向相同,由首轮1至末轮n逐对啮合齿轮进行分析,确定出其轮系首、末两轮的转向关系,即相同或相反。二法用轮系外啮合的对数m确定,由( - 1) m确定出其传动比的正负号来判断,即传动比为正表示首、末两轮的转向相同,为负则表示首、末两轮的转向相反,故平面定轴轮系首、末两轮的转向关系可用其传动比的正负号来表示。
2)空间定轴轮系﹐即组成轮系的齿轮轴线不完全相互平行的,这种轮系的特点是通常轮系中含有轴线不平行的圆锥齿轮传动或蜗轮蜗杆传动。
3k型周转轮系
复合轮系
(3)堂握周转轮系传动比的计算方法
空间定轴轮系首末两轮的转向关系判别又有如下两种情况:一是空间定轴轮系的首、末两轮的轴线是平行的,这时轮系的转向判别需要用画箭头法来加以判别,但其首末两轮的转向关系则可以用正负号表示;二是空间定轴轮系的首、末两轮的轴线不是平行的,这时轮系的首、末两轮转向关系不能用正负号表示,而必须要用画箭头法来加以判别和表示。
圆锥齿轮差动轮系
换向机构
(4)掌握复合轮系传动比的计算方法
计算复合轮系传动比的关键是要将其划分为各种基本轮系,然后为各基本轮系列出相应的计算式,最后再联立求解,即可得出该轮系的传动比。
而轮系划分的关键是先要找出轮系中的周转轮系部分。为此,先要找出在轮系运转中轴线不固定的行星轮及与之用转动副相连的行星架,然后再找出与行星轮相啮合的轴线固定不动的太阳轮。每一行星架,连同行星架上的行星轮和与行星轮相啮合的太阳轮就组成一个周转轮系。一般每一个行星架就对应一个周转轮系。当将这些周转轮系一一找出之后,剩下的便是定轴轮系部分了。
在教材上的例11-2(图11-12)中,轮2及2’为行星轮,鼓轮为行星架,轮1、3为两个太阳轮,这一套就组成一个周转轮系,剩部分(轮3、4、5)为定轴轮系。
内齿轮固定行星轮系
(5)掌握行星轮系效率计算的转化轮系法
用转化轮系法(啮合功率法)计算行星轮系的效率的基础是认为行星轮系的摩擦损失功率与其转化轮系者相等。在中、低速的行星轮系传动中,行星轮的公转速度较低,其所产生的离心惯性力较小,可略去不计。在此前提下,行星轮系在转化前后各运动副中的摩擦状态没有变,相对运动没有变,作用力没有变,因而摩擦力及摩擦损失功率也不会变。知道了行星轮系的摩擦损失功,再加上已知的驱动功率或阻抗功率,就可求出行星轮系的机械传动效率了。
由行星轮系的效率计算式或效率曲线可获得如下两个重要结论:
其一,在增速比较大时,行星轮系会发生自锁;
其二,负号机构(其转化轮系传动比<0的行星轮系)无论用于增速或减速其传动效率总是比较高的,故在动力传动中大多采用负号机构。
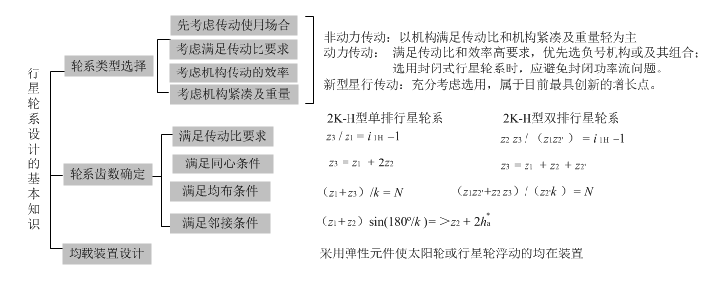
(6)行星轮系设计的基本知识要点
行星轮系设计部分的内容,应着重掌握齿轮齿数选取的四个条件。至于均载装置问题是在设计动力传动用行星传动时所必须考虑的一个重要问题,需要深入了解时,可参阅专著或机械设计手册。
关于封闭功率流这是封闭式行星传动中才有的一个特殊问题。由于封闭功率流的存在,将影响到装置的承载能力和效率。为了扩大知识面,接受新知识,应对新型行星传动有所了解。
5.典型例题
许多升降机起重机的操作人员都担心由于异外原因导致电机失而产生的灾难性事故。解决此问题一个办法就是利用两自由度差动轮系实现双驱动,以提高其安全性。图11-22 所示为扎钢起重机的双电机驱动-传动装置,其钢丝绳滚筒6′就采用两个电机驱动一个两自由度的复合轮系来实现,当一个电机出现故障停转时(此时该电机被相应的制动器1′或4′刹住),另一电机可单独驱动滚筒继续工作,不过工作速度有所降低而已,而两个电机同时出现故障的概率是很低的,故可增加起重机工作的可靠性。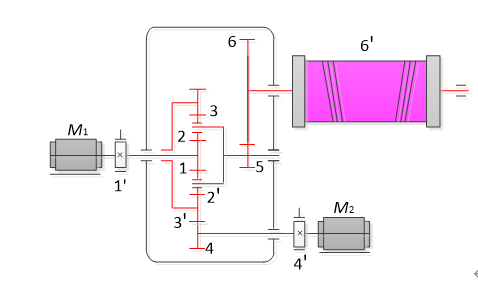
图11-22 扎钢起重机双电机驱动-传动装置
在许多自动加机床中需要采用间歇式运动机构,同时要求解决能实现高速、平滑的停止和运转的间歇运动特性。尤其在输出与输入同轴和高速转动情况下,采用如槽轮机构、不完全齿轮机构等常用间歇运动运动机构都难以解决,而采用如图11–23所示的圆柱齿轮与非圆齿轮组成的行星轮系即为其有效解决的一例。在此行星轮系中,以圆柱齿轮1即太阳轮固定为机架,行星架H为输入,而非圆齿轮3即太阳轮为输出,若设各轮的节圆半径分别r1、r2、r2'及r3,由其传动比iH3 =ωH/ω3=1– i13H = 1–r2r3/(r1r2')可知,当两非圆齿轮2'及3转到r2'=r2,r3=r1时,齿轮3就处于暂停状态;当两轮转到r2'≠r2,r3≠r1时,齿轮3就会转动,即可实现变差动传动,且差动的大小取决于两轮节圆半径相差程度。非圆齿轮部分节线轮廓可通过运动学及动力学设计,可获的超高速运动性能,并具有可实现同轴同向或反向、运动停歇比及速度调节范围宽、结构简单及运动零件相当少的间歇运动机构优点。
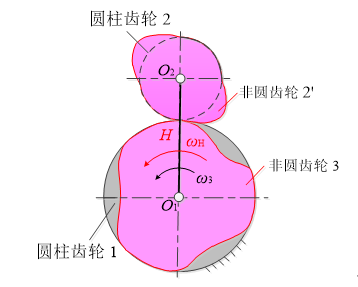
图11-23 圆形-非圆齿轮组合行星轮系。