第13章 工业机器人机构及其设计
第13章 工业机器人机构及其设计
1.学习要求
由于机器人在工业生产中的应用日益增多,为了适应这种发展趋势,本章是机械原理新加的内容。各院校学生可根据各自的情况选讲选学。对本章学习的要求是:
1)对工业机器人的组成情况及其分类有所了解,能对其主要技术指标有明确认识。
2)对工业机器人操作机的运动分析(正解及逆解)的方法及步骤有所认识。
3)对工业机器人操作机的力分析(静力分析及动力分析)有所认识。
4)对工业机器人操作机机构的设计有所了解。
2.重点难点
本章的学习重点是工业机器人的组成情况,分类方法,主要技术指标等。学习难点是对工业机器人的运动分析及力分析。但只要前面三、四章的内容学得扎实,这一部分内容也就不难学了。
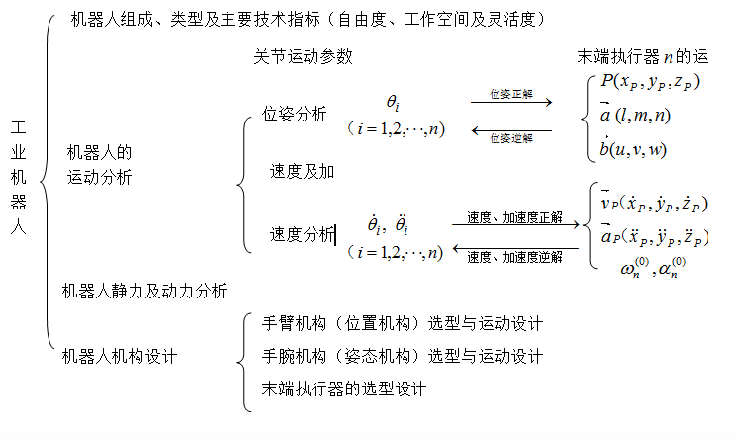
3.知识脉络
4.学习方法
(1)首先要明确本章的主要研究内容
工业机器人是一门跨多种学科的综合技术,但本章只讨论机器人的机构学,也即只讨论机器人的机械部分——操作机。操作机一般由机座、腰部、大小臂、手腕和手部(末端执行器)等组成。腰部及大、小臂用以确定末端执行器的空间位置,故又常称其为位置机构(或手臂机构),而手腕则用以确定末端执行器在空间的姿态,故又称其为姿态机构。学习时应掌握工业机器人的机构学分类。工业机器人操作机中所采用的运动副(在机器人中常称之为关节),目前主要是转动副和移动副(分别用R和P表示),而所采用的机构一般为开式空间运动链机构。工业机器人可根据各种不同的观点来进行分类,但从机构学的观点来说,常根据手臂运动的坐标形式或组成手臂机构的关节来分类。分为直角坐标型(PPP型)、圆柱坐标型(PPR型)、球坐标型(RRP型)、关节型(RRR),而关节型又有垂直关节型和水平关节型之分。此外,目前还有采用空间并联机构作为机器人的操作机机构,也有多种类型。
(2)注意理解工业机器人操作机的主要技术指标操作机的主要技术指标有:
1)自由度的多少,操作机的由度可用教材中式(2—4)来计算。操作机的自由度多,机构运动的灵活性大,通用性强,但机构的结构也更复杂,刚性变差。机构的自由度多于为完成生产任务所必需的自由度时,多余的自由度称为冗余自由度。设置冗余自由度使操作机具有一定的避障能力,在进行运动逆解时,使各关节的运动具有优选的可能。
2)工作空间的大小,它是指操作机手腕中心点所能到达的空间体积的大小。我们把操作机手腕中心点不仅能达到且能完成生产任务的那一部分空间称为看管区域或工作区域,如教材的图13-8中角范围所限定的区域。很显然工作区域将小于或等于工作空间。
3)灵活度,它是指操作机的末端执行器能从多大的方位角范围内接近工件完成生产任务,若能从各个方位接近工件则其灵活度最大。
(3)关于机器人的运动分析内容的学习
机器人运动分析是使用和设计机器人的基础。要学习和掌握好这部分内容,应注意如下问题。首先,要具备一定数学基础知识,即坐标变换和矩阵运算的知识。应做到会对空间构件位置与姿态的描述,建立坐标系和进行坐标之间运动变换与运算。而教材中仅对空间构件位置与姿态表示方法作了简要介绍,而对坐标变换和相关矩阵运算的知识均未作介绍。如果要了解这些内容可以参考第六版教材或有关机器人学的专著等。
其次,掌握建立操作机运动方程式的方法,其关键是掌握建立各坐标系的规定。为便于对操作机进行运动分析,除了在机座上建立一个参考坐标系之外,还在每一个活动构件上建立一个与该构件固接的动坐标系。为了增强在写方程时的程次性,对各坐标系的建立作了一些人为性的规定。
1)建立操作机各构件坐标系的规定图13—1示出了彼此以转动副相联的三杆-1、、+1,与杆固接的坐标系应如下建立:
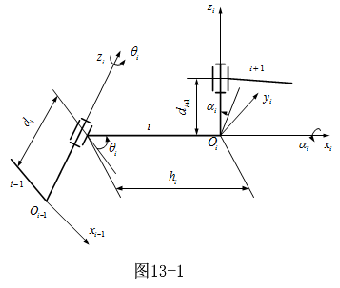
以杆与+1之间的关节轴线为轴;以与轴之间的公垂线为轴,正向由指向;以与轴的交点为坐标原点轴按右手系确定(通常不画出)。
与轴之间的公垂线长度为杆的杆长,为结构常量,沿方向为正;轴之间的公垂线长度称为杆的偏距,沿方向为正;轴相对于绕轴转过的角度称为杆的扭角,为结构常量,以右旋为正;杆相对于绕轴转过的角度称为杆的转角。
当杆与之间为转动关节时,偏距为结构常量,转角为运动变量;当杆与之间为移动关节时,为结构常量,为运动变量,称之为位移,常改用表示。
2)建立末端执行器的夹持器坐标系的规定此坐标系可如图13—2所示方式建立。夹持器的位姿可用夹持器中心P点参考坐标系中的(ip;yps2p)和与夹持器座固接的两单位向量a、b的方向余弦(l, m,n), (u,以, w)来描述。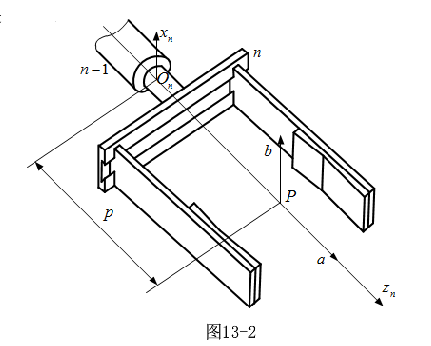
如上建立坐标系,在作操作机的运动分析时,可直接引用教材上所列出的公式求解。此外,应搞清楚机器人操作机运动分析的两类问题。一类是已知各关节的运动参量,需求末端执行器的位姿,通常称此为正解;另一类是根据工作的需要,先确定末端执行器的位姿,再求解各关节的运动参量,通常称此为逆解。正解的解一般是唯一的,且求解过程较简单;而逆解则有多解性,且需解非线性超越方程组,求解难度大。若解算时间长,就难以满足实时控制的需要。
(4)注意机器人的力与动力学分析的重要意义
1)机器人操作机的力分析﹐由于操作机机构大多为空间开链机构,刚性较差,负载能力较小。所以在作力分析时,一般需计及构件自身的重力。通过力分析可以确定各关节中的力和力矩,为操作机的强度和结构设计,为各关节驱动器的选择提供原始数据。
2)机器人操作机的动力学分析﹐由于机器人的真实运动是与组成机器人构件的质量、转动惯量和所受的负载、驱动力或力矩的大小有关,所以通常需要采用牛顿法或拉格朗日法等来建立其运动学方程,根据此运动学方程,通过对机器人的动力学分析可以确定每个驱动器所需的驱动力,或者研究不同惯量、负载对机器人运动性能的影响以及合理地设计机器人部件等的重要性。详细内容可参考有关机器人学专著。
此外,教材中还对操作机机构(手臂机构、手腕机构及末端执行器)的设计作了简要介绍,这里只要求同学对此问题有一个大致的了解。在设计操作机时可参考专著。
5.案例分析