第2章 机构的结构分析
第2章 机构的结构分析
1.学习要求
1)搞清构件、运动副、自由度、约束度、运动链及机构等重要概念,了解机构的分类情况。
2)能认识或分析机械的机构组成情况,并能绘制比较简单的机械的机构运动简图。
3)搞清机构的自由度及其有关的复合饺链、局部自由度、虚约束以及公共约束等概念;能理解机构具有确定运动的条件和运动最小阻力定律,了解其应用;能正确分析计算平面机构的自由度,并能判断其是否具有确定的运动;对空间机构自由度的计算有所了解。
4)搞清平面机构的组成原理和杆组的概念,了解机构的结构分类及结构分析和高副低代的方法。
5)对机构型综合和虚约束对机构工作性能的影响及机构结构合理设计问题的重要性有所认识。
2.重点难点
本章的学习重点是如下“三基”内容:
1)构件、运动副、运动链及机构和机构运动简图、机构自由度及其有关的局部自由度、虚约束,以及公共约束、杆组等基本概念。
2)机构具有确定运动的条件、运动最小阻力定律及机构组成原理的基本理论。
3)机构运动简图的绘制和平面机构的自由度计算的基本方法。
上述内容属于认识机械和学习机械原理知识的首要基础,其学习应做到理解和掌握,并力争会用。至于平面机构的结构分类及分析方法和高副低代,以及机构型综合及机构的结构合理设计等则属于拓宽知识面性质的内容,可做到一般了解。
本章学习难点是:机构中虚约束及公共约束的判定问题。
3.知识脉络
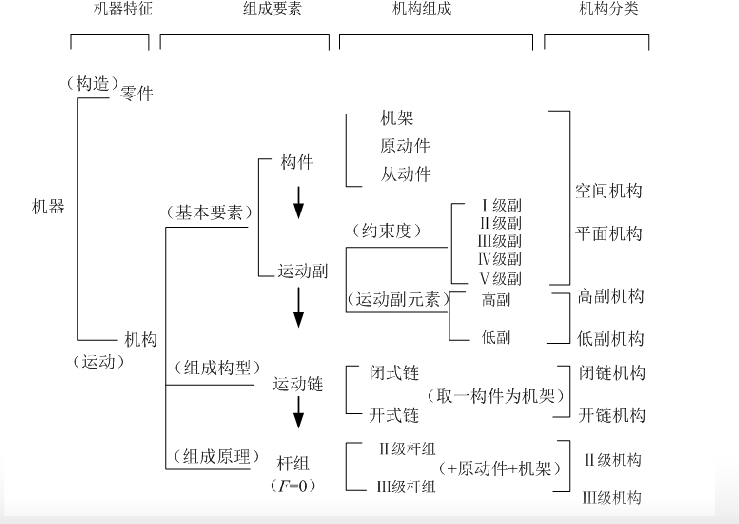
4.学习方法指导
(1)本章学习首先要搞清有关机构的结构组成及结构分析的一些重要概念
1)要抓住本章内容学习的主要特点
机构结构分析是本课程研究的第一部分内容,也是整个机械原理课程学习的基础,将会涉及许多新的概念,这就是本章内容学习的第一特点,所以要学好本章内容,首先需要把这些概念搞清楚。
2)要搞清本章有关机构组成及结构分析等基本概念
一是要把构件、运动副、局部自由度、虚约束、公共约束、杆组等基本概念搞清楚,应做到:正确理解和能准确的解释,并能对机构的结构作出正确的分析和判断;要注意结合对教具、模型和实物的观察来加深对这些概念的理解和掌握,但切勿死记硬背。
转动副

铰链
移动副(1)
移动副(2)

平面高副
如对运动副概念,应结合每一个 具体运动副,应从运动副定义和对运动副元素的约束度、接触形式、相对运动形式及封闭形式的多方面分析来加以理解和掌握,从而学会正确分析和判断运动副的性质及类别。
点高副
线高副

球面副

圆柱副
螺旋副
二是要注意构件与零件、运动副与运动副元素、自由度与约束度、高副与低副、基本运动副和复合运动副(如复合铰链、胡克铰链和复合高副)、开链与闭链、运动链与杆组及机构等概念之间的联系和区别。
胡克铰链
移动副——V型
移动副——燕尾型
三是对于柔性机构、自适应机构、冗余自由度机构、冗余驱动机构、欠驱动机构、 变胞机构及多环机构和高副低代、机构型综 合、局部虚约束、族别虚约束及机构的构型以及机构的结构合理设计等概念和意义作为 扩展知识应有所了解,应尽量去阅读教材中的相关内容。

飞机起落架
(2)要逐步掌握正确地绘制机构运动简图的方法及步骤
1)要充分认识机构运动简图绘制的重要性和难度
由于机构运动简图是机构的分析与设计的基础,能 正确阅读和绘制机构运动简图也是工程技术人员必须具备的基本技能,所以对机构运动简图的绘制必须十分重视。由于实际机械的结构状况及构件形状一般都 比较复杂,所以如何用机构运动简图把它表示出来,对于初学者可能有一定的难度。如果要根据实际机械的结构图纸把它的机构运动简图画出来,其难度可能就更大一些。
2)要具备绘制机构运动简图的能力,应注意掌握以下三个要点:
首先要掌握常用运动副及机构运动简图符号和构件的一般表示方法,掌握机构运动简图绘制的步骤。其次要经常多观察- - 些实际机械,不断增长自己工程实践的感性知识,提高对机械的观察力和读图能力,就容易搞清楚所画机械的结构和运动情况。再则要掌握根据构件和运动副的特征来分清实际机械中的各构件和各运动副类别的方法。而运动副的类别则需根据相邻两运动构件的接触性型式和相对运动特征来加以综合分析判定。
5.典型案例
简摆式颚式破碎机机构运动简图的绘制
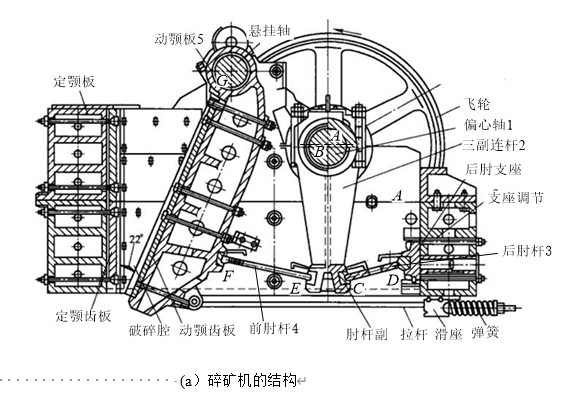
图2-9a所示为一简摆颚式碎矿机。当偏心轴1(与飞轮1'固联)绕其固定轴心A连续逆时针回转时,带动三副连杆2驱动由前、后肘杆4及3往复摆动,而推动动颚板5绕其轴心G往复摆动,从而利用动、定颚板形成破碎楔形腔将矿石轧碎。试绘制此破碎机的机构运动简图。
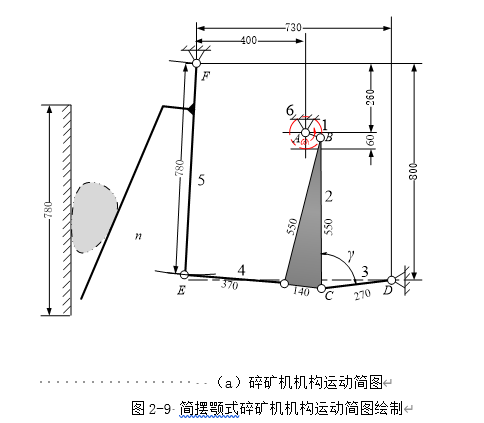
解:首先,分析并搞清该破碎机的组成情况。由破碎机的主要功能和工作过程可知,其原动件为偏心轴l,执行构件为动颚板5。循着运动传递的路线可以看出,此破碎机的偏心轴l、三副连杆2、后、前肘杆3、4及动颚板5都为运动构件,而其余零部件则都可认为是与机座相对固定不动的(若需考虑机器的调节功能或某些辅助运动功能时,则需另加机构来研究),应都视为一个固定构件即机架6,故该机构由5个运动构件和机架6组成。由此根据它们之间的连接结构和相对运动形式,不难分析判别,转动副偏心轴1与机架6在轴心A处组成转动中心固定的转动副A,而又与连杆2在其几何中心B处构成了转动中心运动的转动副B,可见偏心轴1实质上是一个可周转的双转动副构件即曲柄AB;而其余4个运动构件如连杆2、后肘杆3、前肘杆4及动颚板5,且与机架6,依次组成了转动中心位于C、D、E、F、G处的转动副,故该机构由六个构件(含机架)和7个转动副组成。
其次,再选定视图平面和比例尺,并根据该机构的运动尺寸,选定原动件AB的位置,依次定出各转动副A、B、C、D、E、F及G的位置,画出各转动副和表示各构件的线段和简单几何图形;最后在图上标出各构件的数字标号和各转动副字母标号,并在原动件上标出表示其运动方向的箭头。即可得该机构的运动简图,如图b所示。
颚式破碎机