第6章 机械的平衡
第6章 机械的平衡
1.学习指导
1)了解机械平衡的目的和机械平衡的内容。
2)正确理解刚性转子的静、动平衡的概念及条件,掌握刚性转子静、动平衡的原理和计算及实验方法,明确转子许用不平衡量的概念及意义。
3)了解平面四杆机构的平衡原理及方法。
2.重点难点
本章的重点是刚性转子静平衡和动平衡的原理及计算方法,难点是动平衡的计算方法。
3.知识脉络
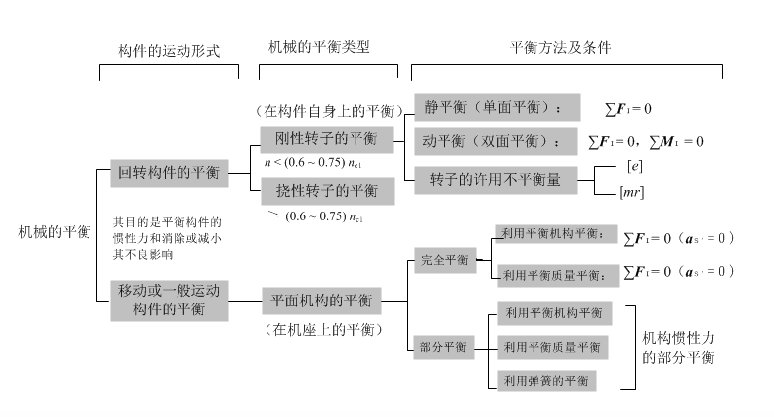 4.学习方法
4.学习方法
(1)要搞清机械平衡的目的和内容
1)机械平衡要解决的问题是设法消除或减小在机械运转中构件所产生的不平衡惯性力和惯性力偶矩。关于构件惯性力和惯性力偶矩的确定,在理论力学课程中和教材第四章中都研究过了,因此重点在于如何在工程实际中应用这些知识来达到完全或部分消除不平衡惯性力对机械工作的不良影响,或有效利用不平衡惯性力进行工作。
2)根据构件的不同运动形式,其所产生的惯性力的平衡方法也不同。例如教材图4-1所示的曲柄滑块机构,其曲柄作绕固定轴转动,滑块作往复移动,而连杆则作一般平面运动。对于绕固定轴转动的回转构件(即转子,如曲柄),可以在构件本身上用增减平衡质量的方法来使构件获得平衡;对于作往复移动或一般平面运动的构件(如滑块和连杆)则不能作到这一点,而只能在机座上进行平衡,使各不平衡惯性力在机座上获得平衡,而不致传到地基上去。故对于转子的平衡和机构在机座上的平衡这两类不同的平衡问题应有正确理解。
3)根据转子刚度大小的不同,将转子分为刚性转子和挠性转子两类。当转子刚度大时其一阶临界转速nc:(此时发生共振)自然也大,而当转子的工作转速n高时,转子轴线产生的动挠度也就大。故n<(0.6~0.75)nei的转子称为刚性转子,在作平衡计算时,不考虑转子轴线的弹性变形;而将n≥(0.6~0.75)nei的转子称为挠性转子,在作平衡计算时,必须考虑在不平衡惯性力作用下转子产生的挠曲变形。本课程只讨论前者。
(2)正确理解刚性转子的静平衡和动平衡问题
1)刚性转子根据其相对长度的不同又可分为两种。当其宽径比b/D<0.2时,因转子的相对长度很短,故可近似认为转子中各偏心质量位于垂直于其回转轴线的同一平面内,这样处理实际上是略去了相对较小的惯性力偶矩的影响,而只考虑惯性力的平衡问题。即认作是一个平面汇交力系的平衡问题,故只要在该平面内适当地加减平衡质量就可作到构件的平衡,我们称这样的平衡为静平衡。
当b/D≥0.2时,因构件的相对长度较大,惯性力偶矩的影响已不能忽视,故必须把各偏心质量所产生的离心惯性力按空间力系来处理,运用理论力学中平衡力合成与分解的原理,可将每一离心惯性力分解为分别作用于选定的两个平衡基面内的一对平行力,在每个平衡基面内按平面汇交力系求解。
注意,当两个平衡基面位于某离心惯性力的同一侧时,距该离心惯性力较远的那个平衡基面内其分量应为负值。这种既平衡惯性力又平衡惯性力偶矩的平衡称为动平衡,它需要两个平衡平面。显然,已动平衡的转子必然是静平衡的,而已静平衡的转子,却不一定是动平衡的。

2)转子的平衡尤其是高速转子的平衡必须认真对待,在设计时需经过平衡计算来达到所需要的平衡精度。转子做好后还需进行平衡试验。在实际操作中,如有可能,在装配之前最好先对转子的各组成构件单独进行静平衡,这样可以减小装配后的动不平衡量,同时也使轴上的弯曲力矩减小。如飞机上的涡轮机由许多圆形的排列在轴上的涡轮机叶轮组成,由于其高速旋转,所以惯性力引起的不平衡量非常大,如果在装配之前先对各个叶轮进行静平衡,则可减小装配后的动不平衡量;而像电动机转子这类设备的平衡则必须在装配以后在两个校正平面上进行,因为不可能随意改变转子线圈的局部质量使其达到平衡而危及其安全性。对转速较高的转子,在其零件图上应明确提出动平衡要求,即应在图纸上标注出允许的残余不平衡量的大小。
1)机构在机座上的平衡是将各运动构件视为一个整体系统进行平衡,以消除或部分消除不平衡惯性力和力偶矩,从而减轻机构整体在机座上的振动。由于机座上承受着三个外力矩(惯性力偶矩、驱动力矩、阻抗力矩),单独消除惯性力偶矩的意义不大,所以一般只考虑机构惯性力的平衡问题。
2)机械经过平衡后,如果其运转速度发生波动,即有角加速度存在,仍会产生动载荷,但此动载荷的方向在转子周向。所以,机械的平衡和机械的调速(在教材第七章中介绍),虽然都是为了减轻机械中的动载荷,但却是两类不同性质的问题,不能互相混淆。
5.案例分析
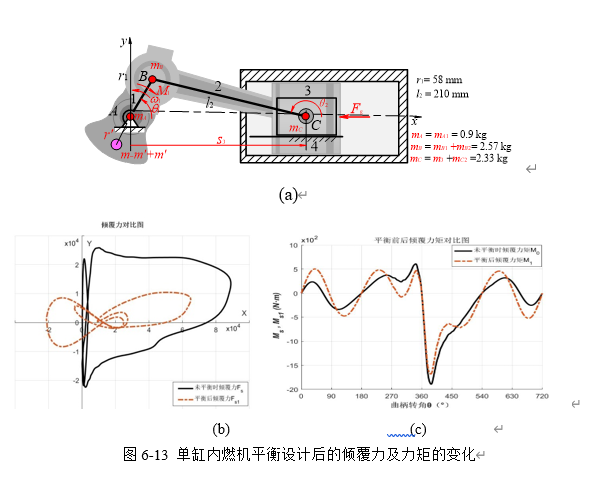
图6-3a所示为一单缸四冲程内燃机曲柄滑块机构结构模型和经前面质量静代换后的等效质量模型及其各等效质量值。由前此机构动力学分析,可知B、C点产生惯性力在机构的机架上产生动态倾覆力Fs和倾覆力矩MS而引起倾覆或振动,试用机构的平衡法对其单缸内燃机机构进行平衡设计。
解:由本案例之前机构动力学行为分析可知,该机构主要受有气动力、各构件的惯性力和倾覆力。因平衡对其气动力不产生影响,而主要是平衡其惯性力和倾覆力。单从机构的理想平衡来看,最好应达到惯性力的完全平衡。但就单缸内燃机的平衡而言,采取平衡机构完全平衡或平衡质量完全平衡,均不合适其单缸内燃机的工程实现,也无其实际案例,而只适合于多缸内燃机的平衡设计。因此单缸内燃机的平衡,通常只能采用平衡质量部分平衡的方法。为此,由前可知,对于惯性力FIB,可通过曲柄AB的反向延长线r'上B'处,添加一适当平衡质量m'便可完全平衡;而对于往复运动滑块C处惯性力FIC,工程中也一般采取平衡其惯性力的1/3~1/2,即在B'处再增加一平衡质量m''加以平衡,而不至于产生新的不平衡的倾覆力,从而以获得折中平衡的工程满意效果。
由本案例运动分析结果可知,滑块运动的加速度函数中的二阶谐波项cos2w1t对其很小,其产生的惯性力可以忽略。所以惯性力FIC和FIB,由式(5-30c')可知
FIC ≈ r1w21(m3+ mC2) cosq1
FIB =r1w21(m B1+ mB2)cosq1 + i r1w21(m B1+ mB2)sinq1
平衡FIB 只需在B'处加一平衡质量m',且取r'=r1/2,则由其静平衡条件可得
m'= r1mB/r' = 3.46 kg
平衡FIC需在B'处再加一平衡质量m'',其所产生的惯性力两坐标分量为
F''IB' = F''IB'x +iF''IB'y = – r'w21m'' cosq1 – i r'w21 m''sinq1
显然F''IB'x= – FIC,而若平衡其中1/2的惯性力,可得
m'' = mC/(2r')=2.33 kg
于是得 mˊ= m' + m''= 5.79 kg
据此,r'= r1/2=29 mm,由曲轴材料的密度γ,便可设计其曲轴上平衡块的扇形块形状和尺寸(如图a所示)。
由于单缸内燃机经平衡后,系统增加了平衡惯性力为
FIB'= FIB'x +iFIB'y = – r'w21(m' + m'')cosq1 – i r'w21 (m' + m'')sinq1
因此,经平衡后的机座的振动力Fs和振动力矩Ms则为
Fs = FR14+ FR34+ F''IB
= –(Fg + a3mC )+w21[rmB – r'(m' + m'')]cosq1 + iw21 [rmB– r' (m' + m'') ]sinq1
Ms = – MA= s3FR43= –s3FR34= –s3(Fg+ a3mC+w21[rmB – r'(m' + m'')]cosq1) tanj2
据此,进行编程利用MATLBA工具软件计算,可得当w1=3400r/min时在一个循环周期内作用于机架的上振动力矩和振动力矩线图分别如图b及c所示。由图可见,在曲柄上添加的平衡质量,对该内燃机的倾覆力有明显的平衡作用,而对倾覆力矩平衡不明显。